

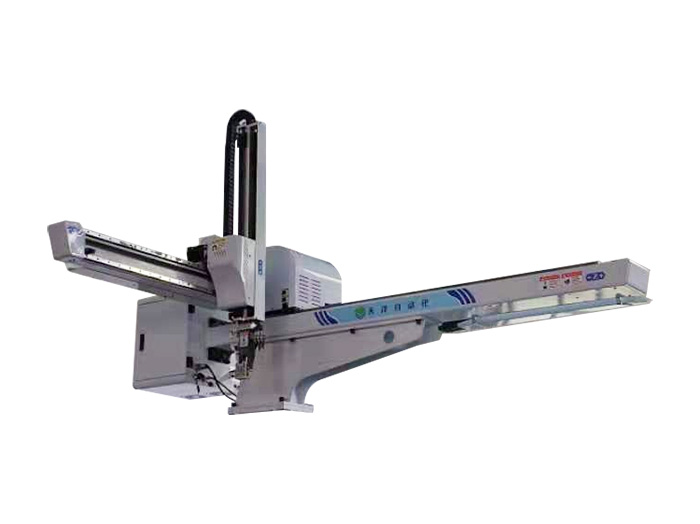
嘉善六轴机械手作用有哪些?
文章出处:本站 人气:5475 发表时间:2022-12-07 07:45:04
六轴机械手的末端工具应该怎样去选择?
六轴机械手是现如今注塑生产中的重要生产设备,但是很多注塑生产商未曾对机械手末端工具的使用加以重视。其实在注塑成型的过程中,六轴机械手末端工具是一个相当重要的组成部分。如果注塑机械手和柔性的末端工具连接在一起,可以很经济方便地进行多种制品的移动操作。
六轴机械手末端工具系统怎样选择才能符合制品需要呢?为了选择出最高效的机械手臂末端工具系统,首先应综合考虑来自修理部门、采购部门和生产部门的意见。同时还应该考虑影响制品脱模的其他因素:
1.为了避免制品上出现不必要的斑痕,应考虑对模具做适当的修正,以使制品能够更方便地被移出。
2.在制品外观的设计上,通过添加小的倒角以使它更容易脱模。
3.改变材料温度不仅能使制品的脱模更为容易,而且还可以减少制品脱模后表面出现的斑痕或发生形变的几率。
4.机械手上是否有足够的空气/真空电路以及电流输入输出端,以便它同机械手臂末端工具相连接。
5.六轴机械手能不能达到成型周期所要求的速度?

六轴机械手操作流程是怎样的?
1、先接好气管,让机械手气压表的气压在4kg-8kg之间。
2 、打开机械手电源开关,并在注塑机控制板上打开机械手功能键。
3 、注塑机开模完成后,先手动放下机械手臂,并调节好手臂下降的位置。在调试机械手的各行程位置时,首先模开到足够宽的位置,再把机械手气缸里的气放掉,用手慢慢地托下主臂,再逐一进行调试,以免六轴机械手下降时损坏模具及治具。
4 、按“手动”键,即可进入手动操作画面,依所须动作,先按“选择”键,再 按“动作”键,依次调节好各动作的延时时间,检查安全报警装置,机械手取出异常时能否发生报警,开机之前必须调好检测,以免压模 。
5、按产品的要求设定或选择所需要的程式合理进行取物, 然后在注塑机自动状态下,按“全自动”键即可进入自动生产。
6、如要修改动作程式:按“停止”键和“修改”键,进入程式修改画面。
7、技术人员可依据不同的模具,输入动作程式“0-99”,确定后按“输入”键 确认,再按“停止”键,然后按“全自动”键进入自动生产。
8、其它设定参照设备使用说明书。

六轴机械手驱动系统该怎么维护?
由于六轴机械手能够大幅度的提高生产率和降低生产成本,能够稳定和提高注塑产品的质量,避免因人为的操作失误而造成的损失。因此,注塑六轴机械手在注塑生产中的作用变得越来越重要。随着注塑成型工业的发展,以后将有越来越多的六轴机械手用于上料、混合、自动装卸模具、回收废料等各个工序上,而且将朝着智能化方向发展。下面小编就来讲讲六轴机械手驱动系统吧!六轴机械手驱动系统扮演着一个很重要的角色,那么我们应该怎么维护呢?
如果六轴机械手采用装配架-传动齿轮驱动,注意在运行过程中是否有任何迟疑或晃动发生。除了光滑平稳的动作之外的所有运动都可以表明驱动系统损坏或内部寄存了一些异物。
六轴机械手推动向下运动时,快速检查装配梁和传动齿轮之间动作或齿隙的方法是推拖运动臂,感觉异常运动(来回动作不同)。然而由于正常的厂家公差精度非常高,因此本试验方法将会非常不精确。
如果你怀疑装配梁和传动齿轮可能有问题,较好的方法是使用量程长的磁性表座。按照厂家说明书调整好六轴机械手齿隙后,检查轴的全部行程,保证装配梁和传动齿轮之间没有太紧的地方。
如果齿隙不能调整,那么装配架和传动齿轮可能出现磨损,需要替换。如果必需修补装配架和传动齿轮,那么最好同时替换两个构件从而保证长期性能。
至于靠传送带驱动的轴,密切注意传送带磨损落下的碎屑以及本身的损害。仔细检查滑轮,留意源自传送带材料的灰尘的迹象。确保传送带和传动滑轮以及槽轮的完全排列成行。方向偏离的传送带会非常快地磨损掉。只要是传送带驱动的系统,可按照厂家的说明书检查传送带本身的预加负荷。这些规范将告诉你:相对于滑轮,在传送带具体位置上的适宜误差量。
六轴机械手主要由执行机构、驱动机构和控制系统三大部分组成。
那你知道它的驱动机构有那些吗,我们来看看。他们都是有那些作用呢。
六轴机械手的执行机构分为手部、手臂、躯干;
3、躯干躯干是安装手臂、动力源和各种执行机构的支架。
1、手部:手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
六轴机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的最多。
可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂:手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。
为了使六轴机械手能够正确地工作,手臂的3个自由度都要精确地定位。
六轴机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。六轴机械手的控制分为点位控制和连续轨迹控制两种。
控制系统可根据动作的要求,六轴机械手设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制六轴机械手进行工作程序的存储方式有分离存储和集中存储两种。
分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。
这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。

六轴机械手的特点:
1、安装简单:立柱式结构,可连接齿轮冲床、气动冲床及各种油压机;
2、全面满足冲床自动上下料需求:可根据冲床高度、送料高度、下料高度自动适应;
3、傻瓜式操作:冲压自动化机械手采用示教模式规划运动轨迹,简单易用;
4、量身订制解决方案:依客户的个性化需求,量身订制较好解决方案,避免客户错误的设备投资;
5、应用广泛:吨位冲床、各种高度的机台均可使用,多角度实现各种复杂冲压动作,如翻转、打废料、侧挂或斜放、堆料等。
- 上一篇: 昆山六轴机械手有哪些功能?
- 下一篇: 昆山助力机械手做出来的产品质量怎样?




