

浙江上海注塑机机械手如何进行更好的系统控制?
文章出处:本站 人气:7061 发表时间:2022-09-26 08:19:17
注塑机机械手的手部是用来直接抓取注塑制品的部件。由于注塑制品的形状,大小,重量及表面特征等方面存在着差异,因此注塑机机械手的手部有多种形式,一般可分为夹持式和吸附式两种。夹持式手部的主要形式为夹钳式,常用于抓取不易破碎或变形的制品,它对所抓取的制品的形状有较大的适应性。夹持式手部由手指,传动机构和驱动装置组成。
对于夹持式手部,进行注塑机机械手设计选用时主要考虑以下几点。
(1)手部应具有适应的夹紧力和驱动。
(2)手指应具有足够的开关范围。
(3)手指对制品应具有一定的夹持精度。
(4)手部对制品应具有一定的适应能力,且要求手部能耐受注塑制品刚从模腔中取出时的高温及腐蚀性。

机械手从动力上来讲有伺服的也有气缸的,还有伺服气缸混合的。从动作上来讲有横走式的也有反转式的,高级点的也有6轴机械手。
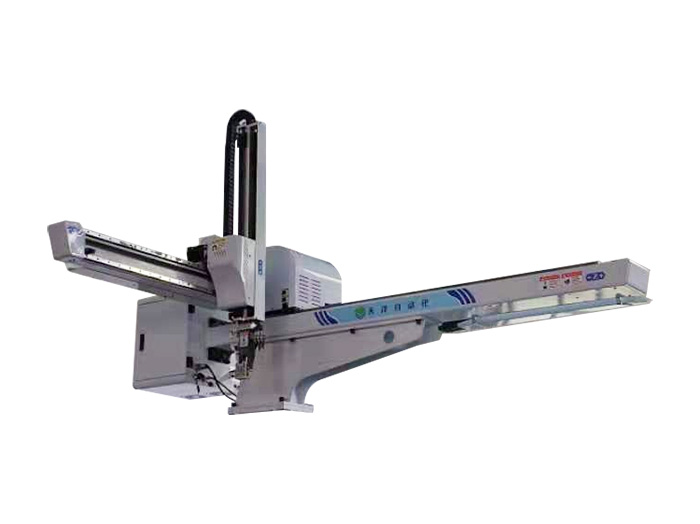
咱们就以常用的友信注塑机机械手为例进行简单说明。注塑机机械手可以沿XYZ(即前后、左右、上下)方向移动。手臂的末端可以安装取出治具,取出治具上面可以根据产品不同安装取出产品用的吸盘或抱具,或夹取料头用的气动夹嘴。当模具开模后,机械手臂下降到模具内合适的位置吸住产品、夹住料头,并将产品和料头从模具上取出来,然后机械手臂上升到模具上面,再移动到注塑机后面(有时移动到前面),夹嘴在料头箱上方开放,让料头落下到料头箱内。
产品随注塑机机械手继续移动到合适位置后手臂下降,手臂反转90度,将产品放在传送带或整列机上。然后机械手臂回到模具上方等待取出下一模产品。大概就是这么一个过程。因此需要根据产品要求先设定好机械手动作模式,并设定好机械手每一步动作需要到达的位置和速度,以及等待时间等。试运行没有问题后才可以全自动运转。
当然具体的调整需要一定的熟练过程和经验积累。因此想用机械手的话一定要先仔细阅读机械手操作说明书,按照说明书的讲解一步一步的调整。
注塑机机械手手臂的组成:
(1)运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
(2)导向装置。是保证手臂的正确方面及承受由于工件的重量所产生的弯曲和扭转的力矩。
(3)手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据注塑机机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响注塑机机械手的工作性能。

注塑机机械手的日常维护保养。
1、各部位螺丝,衔接紧固件有无松脱
由于长期持续作业,各部位螺丝、衔接紧固件的松脱是导致注塑机机械手和成型机模具破损的原因。
a.臂上升/下降,引入/引退,横行及旋出、旋入等固定部位的螺丝,螺母是否松脱
b.上下行程及引入行程调整用的挡板,防落器托架的固定螺丝是否松脱。
c.机体单元和控制箱间的机箱内的端子是否松脱.(误动作原因)
2、气压回路与各部位衔接线的查看
a.气管的扭折损害会影响气压的恰当流量.
b.对进气过滤器内的积水及油污进行清洗.
c.各气管接头或气管有无漏气现象.(形成气压不足)
d.信号衔接线的损害会导致注塑机机械手发生误动作或漏电现象.
3、注塑机机械手动作测验及限位检测信号的承认查看
a.定时测验注塑机机械手配件及各动作是否有反常现象。如:动作时异响
b.查看注塑机机械手信号及各限位检测开关信号,在注塑机机械手动作时,输入,输出的检测信号有无闪耀现象。
c.检查各限位检测开关是否有因注塑机机械手长期作业而引起的方位移位改变,形成注塑机机械手限位检测信号的不良现象。
4、各导轨外表污垢的铲除及各移动部份的定时给油
a.下行,前后和横行用导轨外表上的黄油或废物附着所形成的污垢进行定时清理。
b.对注塑机机械手各移动部份及机械轴承,滑块等部件进行定时给油及加注黄油。

注塑机机械手的特点:
1、安装简单:立柱式结构,可连接齿轮冲床、气动冲床及各种油压机;
2、全面满足冲床自动上下料需求:可根据冲床高度、送料高度、下料高度自动适应;
3、傻瓜式操作:冲压自动化机械手采用示教模式规划运动轨迹,简单易用;
4、量身订制解决方案:依客户的个性化需求,量身订制较好解决方案,避免客户错误的设备投资;
5、应用广泛:吨位冲床、各种高度的机台均可使用,多角度实现各种复杂冲压动作,如翻转、打废料、侧挂或斜放、堆料等。
- 上一篇: 浙江上海助力机械手有哪些功能?
- 下一篇: 浙江嘉兴伺服机械手做出来的产品质量怎样?




