

上海气动机械手作用有哪些?
文章出处:本站 人气:8198 发表时间:2022-05-30 12:29:11
气动机械手的末端工具应该怎样去选择?
气动机械手是现如今注塑生产中的重要生产设备,但是很多注塑生产商未曾对机械手末端工具的使用加以重视。其实在注塑成型的过程中,气动机械手末端工具是一个相当重要的组成部分。如果注塑机械手和柔性的末端工具连接在一起,可以很经济方便地进行多种制品的移动操作。
气动机械手末端工具系统怎样选择才能符合制品需要呢?为了选择出最高效的机械手臂末端工具系统,首先应综合考虑来自修理部门、采购部门和生产部门的意见。同时还应该考虑影响制品脱模的其他因素:
1.为了避免制品上出现不必要的斑痕,应考虑对模具做适当的修正,以使制品能够更方便地被移出。
2.在制品外观的设计上,通过添加小的倒角以使它更容易脱模。
3.改变材料温度不仅能使制品的脱模更为容易,而且还可以减少制品脱模后表面出现的斑痕或发生形变的几率。
4.机械手上是否有足够的空气/真空电路以及电流输入输出端,以便它同机械手臂末端工具相连接。
5.气动机械手能不能达到成型周期所要求的速度?

气动机械手的运用可以帮企业节省大量的人力成本,提高产品的品质及工作效率,是企业迈进智能制造较好的帮手。
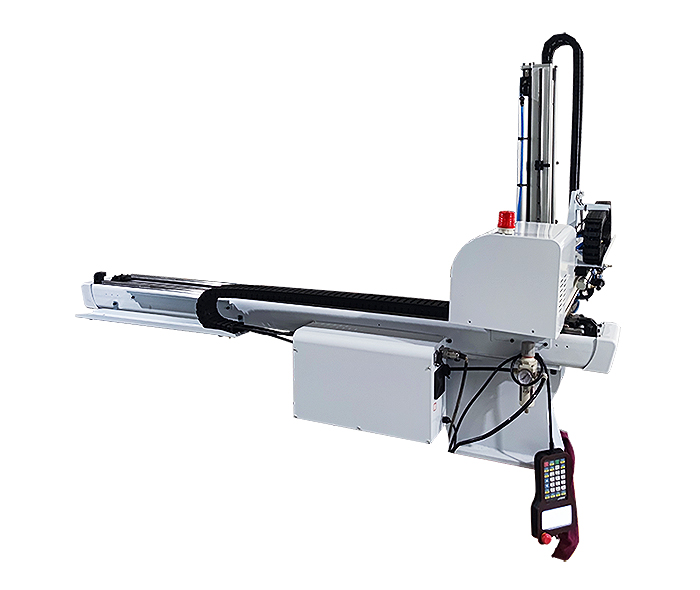
气动机械手的功能及优点 :
1.上下轴伺服马达驱动,成品臂上下轴由AC伺服马达驱动,可快速的横行动作,节省模内时间,增加效率,并可在模外设置不同的置物高度,定位精度为 0.2MM,喷离型剂组可设定几模喷,每次喷多久,喷头可以装在手臂或模具上。
2.引拔位置、行程电动遥控调整,节省调整时间增加操作的安全性。上下电动调整行程,上下行程电动遥控调整,节省调整时间增加操作的安全性。横行轴数字控制,数字设定横行行程,可多点及循放成品,最多可放99点。用于排列成品。
3.横行伺服马达驱动,横行轴可选用AC伺服马达驱动,并采用精密级行星减速机以齿轮齿条传动,速度快定位准确;定位精度达0.1MM,可应用于需定位准确之取出。
气动机械手的双截式手臂采用高刚性线性滑轨及铝合金结构梁,特殊设计的皮带倍速机构,可大符度的缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程。除了可增加上下行的速度及稳定度,并且可配合厂房高度低之场所。
气动机械手在设计的过程中,当确定运动速度气动机械手各动作的最大行程确定之后,可根据生产需要的工作拍节分配每个动作的时间,进而确定各动作的运动速度。液压上料气动机械手要完成整个上料过程,需完成夹紧工件、手臂升降、伸缩、回转,平移等一系列的动作,这些动作都应该在工作拍节规定的时间内完成,具体时间的分配取决于很多因素,根据各种因素反复考虑,对分配的方案进行比较,才能确定。气动机械手的总动作时间应小于或等于工作拍节,如果两个动作同时进行,要按时间长的计算,分配各动作时间应考虑以下要求:
一.给定的运动时间应大于电气、液压元件的执行时间;
二.在工作拍节短、动作多的情况下,常使几个动作同时进行。为此驱动系统要采取相应的措施,以保证动作的同步。
三.伸缩运动的速度要大于回转运动的速度,因为回转运动的惯性一般大于伸缩运动的惯性。在满足工作拍节要求的条件下,应尽量选取较底的运动速度。气动机械手的运动速度与臂力、行程、驱动方式、缓冲方式、定位方式都有很大关系,应根据具体情况加以确定。

气动机械手的应用领域:
1.工业制造领域:
主要让机器人在机械制造业中代替人完成大批量、高质量要求的工作,如汽车制造、舰船制造及某些家电产品(电视机、电冰箱、洗衣机)的制造等。化工等行业自动化生产线中的点焊、弧焊、喷漆、切割、电子装配及物流系统的搬运、包装等工作,也有部分是由机器人完成的。
2.军事领域:
主要让机器人执行一些自动的侦察与控制任务,尤其是一些相对较为危险的任务,比如,无人侦察机、拆除炸弹的机器人及扫雷机器人等。机器人还可以代替士兵去完成那些不太复杂的工程及后勤任务,从而使战士从繁重的工作中解脱出来,去从事更加重要的工作。
3.娱乐领域:
机器人在娱乐领域的应用十分广泛,比如,机器人足球大赛、机器人弹钢琴和机器人宠物等。
4.医疗领域:
机器人主要用来辅助护士进行一些日常的工作,比如,帮助医生运送用药品及自动监测病房内的空气质量,等等。宜用机器人还可以协助医生完成一些难度较高的手术,例如,眼部手术、脑部手术等。美国还发明了一种可以进入人体血管的微型机器人,帮助医生在病人的血管内灭杀病毒。

气动机械手主要由执行机构、驱动机构和控制系统三大部分组成。
那你知道它的驱动机构有那些吗,我们来看看。他们都是有那些作用呢。
气动机械手的执行机构分为手部、手臂、躯干;
3、躯干躯干是安装手臂、动力源和各种执行机构的支架。
1、手部:手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
气动机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的最多。
可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂:手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。
为了使气动机械手能够正确地工作,手臂的3个自由度都要精确地定位。
气动机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。气动机械手的控制分为点位控制和连续轨迹控制两种。
控制系统可根据动作的要求,气动机械手设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制气动机械手进行工作程序的存储方式有分离存储和集中存储两种。
分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。
这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。
- 上一篇: 昆山五轴机械手做出来的产品质量怎样?
- 下一篇: 安徽斜臂机械手工作效率如何?




